目的
その3
Broadcast/Listenerを使ってrosを試すの続き。
第7段階
基本的に「Autoware:自動運転ソフトウェア入門」の演習通りに進めた。turtle1をturtle2が追いかける演習を行うが、
1. ソースコード作成
2. CMakeLists.txt編集→ビルド
3. launchファイル編集→実行
という手順の中で、実行の前に、実行するterminalでは~/catkin_wsにおいて、source devel/setup.bashの実行が必須となることは注意が必要である。
第8段階
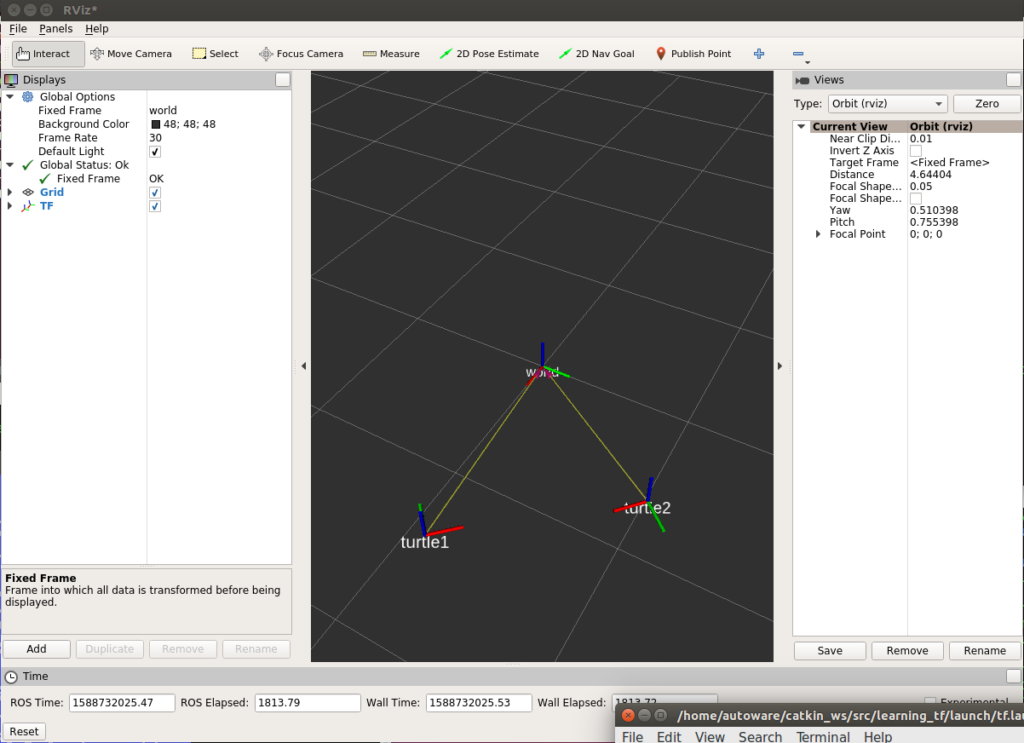
上記演習を動かした状態で、rvizを実行して、TFを確認する。
1. 左の”Displays”の”Global Options”の”Fixed Frame”を「world」に設定
2. 左下の”Add”ボタンを押して、「TF」を選択
すると、下記のように、座標系の確認ができる。